AvoidObstacle program.
You can program your robots using several languages and compilers. We choose here C++ with Microsoft Visual Studio 2005. The easier way to create a robotics application over MODA library is using the Marilou Wizards.
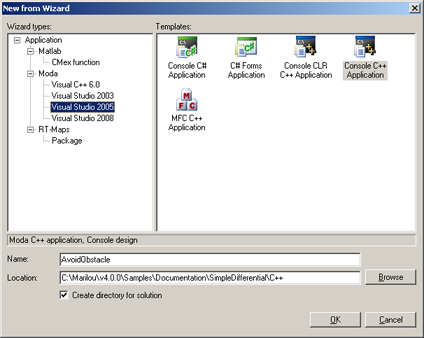
Open wizards dialog box using File-> New -> New from Wizards and choose Application MODA. If your compiler is not registered, see MODA C++ documentation for knowing required libraries and build options for your compiler.
//////////////////////////////////////////////////////////// //Simple AvoidObstacle from documentation tutorial //////////////////////////////////////////////////////////// #include "Modacpp.h" #include "conio.h" using namespace ModaCPP; #define DEFAULT_MODA_SERVER "localhost" #define DEFAULT_ROBOTNAME "/creupsrobot0" //*********************************************************************** class MyRobot { private: ModaCPP::RobotPHX *_pPHX; ModaCPP::DeviceDistance *_pLeftSensor; ModaCPP::DeviceDistance *_pRightSensor; ModaCPP::DeviceMotor *_pLeftMotor; ModaCPP::DeviceMotor *_pRightMotor; public: MyRobot(ModaCPP::RobotPHX *pPHX) { _pPHX=pPHX; //query distance sensors devices _pLeftSensor=_pPHX->QueryDeviceDistance("zone_left/mysensor"); _pRightSensor=_pPHX->QueryDeviceDistance("zone_right/mysensor"); if(_pLeftSensor && _pRightSensor) _cprintf("Distance sensors OK\r\n"); else _cprintf("Distance sensors ERROR\r\n"); //query motors devices _pLeftMotor=_pPHX->QueryDeviceMotor("hinge_left/a2/mymotor"); _pRightMotor=_pPHX->QueryDeviceMotor("hinge_right/a1/mymotor"); if(_pLeftMotor && _pRightMotor) _cprintf("Motors OK\r\n"); else _cprintf("Motors ERROR\r\n"); } bool IsValid(void) { if(_pLeftSensor && _pRightSensor && _pLeftMotor && _pRightMotor) return(true); else return(false); } void Step(void) { //Do step #define LARGE 1.0f #define MEDIUM 0.5f #define MINI 0.2f #define MAXSPEED 720 #define MEDIUMSPEED 360 float lm,rm; float ld,rd; int PerformWait=0; ld=_pLeftSensor->GetMeasure(); rd=_pRightSensor->GetMeasure(); if( (ld>=LARGE) && (rd>=LARGE)) { lm=MAXSPEED; rm=MAXSPEED; } else { if( (ld>=MEDIUM) && (rd>=MEDIUM)) { PerformWait=200; if(ld>rd) { lm=MEDIUMSPEED; rm=MAXSPEED; } else { rm=MEDIUMSPEED; lm=MAXSPEED; } } else { if(ld>rd) { lm=-MEDIUMSPEED; rm=MEDIUMSPEED; } else { lm=MEDIUMSPEED; rm=-MEDIUMSPEED; } PerformWait=250; } } _pLeftMotor->SetVelocityDPS(lm); _pRightMotor->SetVelocityDPS(rm); //force long rotations if(PerformWait) _pPHX->GetConnection()->Sleep(PerformWait); } }; //*********************************************************************** int main(int argc, char* argv[]) { CommandLine::ProcessCommandLine(argc,argv); //CommandLine::DisplayArguments(); //manage command line argument xkode::lib::String RobotName=DEFAULT_ROBOTNAME; xkode::lib::String ServerAdress=DEFAULT_MODA_SERVER; if(ModaCPP::CommandLine::ExistsValue("/robot")) RobotName=ModaCPP::CommandLine::GetArgumentValue("/robot"); if(ModaCPP::CommandLine::ExistsValue("/server"))ServerAdress=ModaCPP::CommandLine::GetArgumentValue("/server"); _cprintf("Using %s on server %s\r\n",RobotName.GetData(),ServerAdress.GetData()); ModaCPP::Connection *pConnection=new ModaCPP::Connection(true); //Try connect to MODA server if(pConnection->Connect(ServerAdress)) { _cprintf("Connection ok to moda server\r\n"); //Find the robot ModaCPP::RobotPHX *pPHX=pConnection->QueryRobotPHX(RobotName); if(pPHX) { _cprintf("robot found, searching devices\r\n"); MyRobot *pMyRobot=new MyRobot(pPHX); if(pMyRobot->IsValid()) { while(!_kbhit()) { //step the robot pMyRobot->Step(); //update every 50 simulated ms pConnection->Sleep(50); } } delete pMyRobot; delete pPHX; } else { _cprintf("robot %s found\r\n",RobotName.GetData()); } } else { _cprintf("Unable to connect to moda server %s\r\n",ServerAdress.GetData()); } //Disconnect & delete pConnection->Disconnect(); delete pConnection; _getch(); return 0; }
When your application builds, you can go to the next chapter ...
|
Documentation v4.7 (18/01/2015), Copyright (c) 2015 anyKode. All rights reserved.
|
|
What do you think about this topic? Send feedback!
|







 Description
Description