This section describes how to program a simulated robot.
Robot programming can be done with the native MODA sdk (Marilou Open Devices Access) or third-party systems like RT-Maps components, MATLAB and all systems that allow to embed a C++ library (or a .net assembly for managed code MODA version).
Also, you can add plugins to Marilou : plugins let you control the simulator directly receiving command from your TCP server (or other communication ways). Plugins let you create dynamically devices that are not referenced in the native simulation engine.
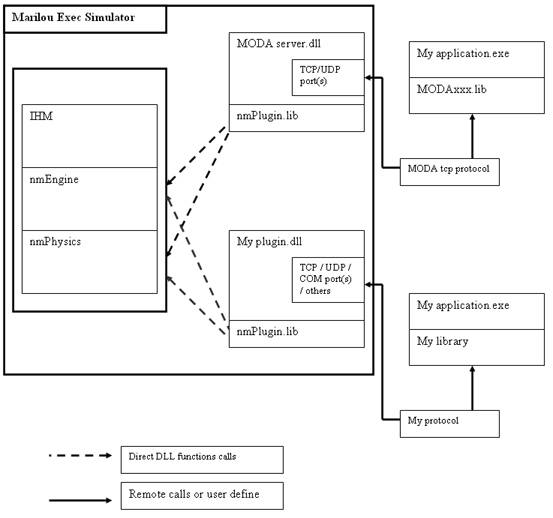 |
The picture shows the global simulation engine architecture. Samples located in the [INSTALL_DIR]/Samples are .EXE applications based on the modaxxxx.lib. The MODA library send/receive commands to/from its server : MODAserver.dl that is a plugin loaded by the engine. If you want to create your own TCP/UDP/COM/others server, you have to create your own plugin that is able to send/receive commands and act directly on the simulation engine. (See the Plugins section). |
|
Documentation v4.7 (18/01/2015), Copyright (c) 2015 anyKode. All rights reserved.
|
|
What do you think about this topic? Send feedback!
|







 Description
Description