|
anyKode Marilou
|
   |
   |
Check-point
|
anyKode Marilou
|
|
|
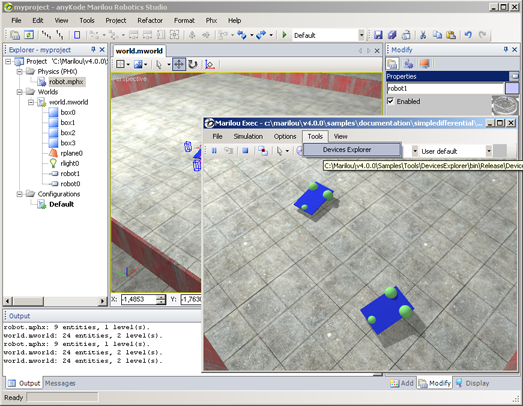
Check the environment and models.
We will check if all entities are connected and named correctly. This step is important because the AvoidObstacle program will not be able to reach devices otherwise.
( ) Exec (the simulator) is starting and displays our two robots. If you see that wheels are ejected that's mean that joints are not connected correctly. If robots are ejected, check that they are not inside the ground.
) Exec (the simulator) is starting and displays our two robots. If you see that wheels are ejected that's mean that joints are not connected correctly. If robots are ejected, check that they are not inside the ground.
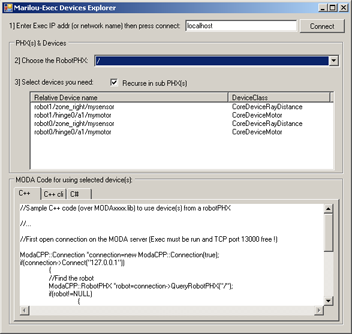
Whereas simulation is running, start the Devices Explorer tool (see below). Connect to localhost and choose the high level PHX (the world) always named '/'. Then, check that devices are named like:
 |
 |
|
Documentation v4.7 (18/01/2015), Copyright (c) 2015 anyKode. All rights reserved.
|
|
What do you think about this topic? Send feedback!
|

 Description
Description