Tutorial simulation !
We are now ready to check the efficience of our AvoidObstacle sample. It is possible to start the AvoidObstacle application from several ways (automatically, from visual studio, from command line ...) : we choose here to run it automatically at simulation startup.
|
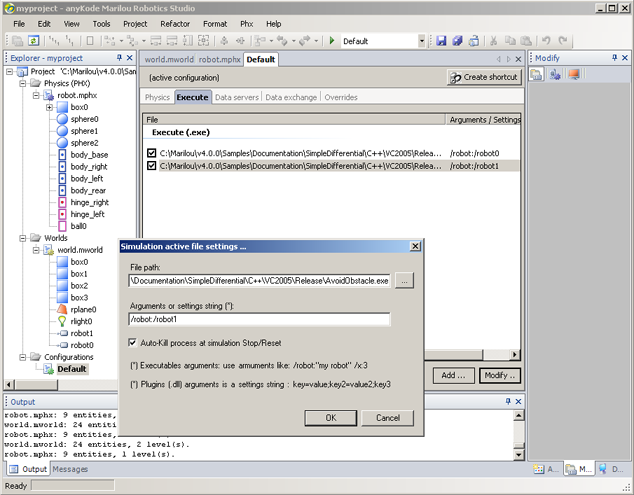 |
You can run the simulation from several ways (See also Execute Simulation), we choose here to run it from Marilou IDE.
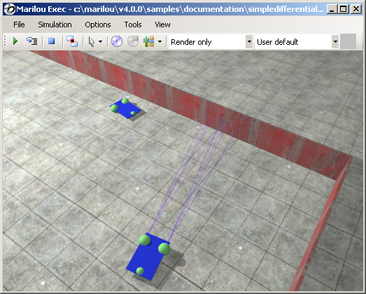
Click on the Start Simulation button ( ): Exec simulator is starting and shows our two robots moving in the area !!
): Exec simulator is starting and shows our two robots moving in the area !!
|
Documentation v4.7 (18/01/2015), Copyright (c) 2015 anyKode. All rights reserved.
|
|
What do you think about this topic? Send feedback!
|







 Description
Description