Communication plugin for dialing from outside the simulated world.
This plugin allow to create automatically a device that will be ready to dial with the 'real world' side (DeviceExternalCommunicationPort). This is a bridge between the real world and the simulated world. The device reads data from a Communication Port or another MODA application and gives it to the robotics application (bi-directional).
|
Configuration du PHX |
Description |
|
Attach the plugin "External Communication" to the PHX. | |
|
Set properties: device name, in/out buffers size. Save the PHX document: Exec will start the device automatically at next simulation startup. |
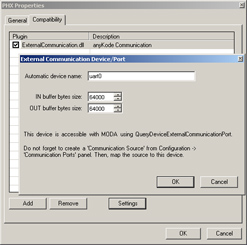 |
You have to configure the communication port (the data source) from the configuration's Communication ports panel.
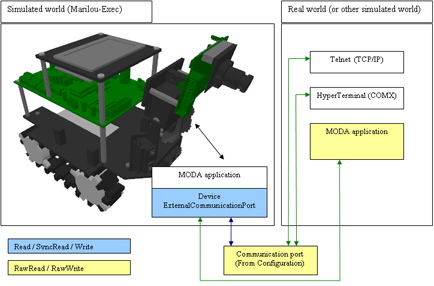
(Communication flow)
|
Documentation v4.7 (18/01/2015), Copyright (c) 2015 anyKode. All rights reserved.
|
|
What do you think about this topic? Send feedback!
|







 Description
Description