Compatibility with the SXW24 prototype card
The SXW24 prototype card dialogues via serial link, allowing you to control up to 24 servo-motors (see manufacturer documentation for more information).
|
Configuring the PHX |
Description |
|
Attach the EasyRobotics SXW24 plugin to the PHX. |
(See Attaching to a PHX) |
|
Map the ID numbers used by the card to the name(s) of the servo-motor(s) available in your robot. You may change the the device's default name. |
|
|
Save the PHX: at this point the PHX is compatible with the SXW24 card. |
|
|
Using the PHX |
|
|
Place the PHX in the world. |
|
|
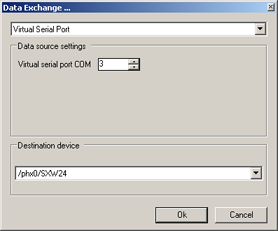
Create Data Exchange to dialogue with the card in the current configuration (that which is running the world that contains the robot in question). This example shows virtual serial port settings. "Destination device" is the name of the device created by the plugin. |
 |
When you execute simulation, you will be able to issue the commands listed in the documentation for the SXW24 and servo-motor controllers that you are using.
|
Documentation v4.7 (18/01/2015), Copyright (c) 2015 anyKode. All rights reserved.
|
|
What do you think about this topic? Send feedback!
|







 Description
Description