Class Creator tool: generates automatically class code for a given robot.
The Class Creator Tool generates a class that contains the code required for dialing with the robot: devices enumeration, names, groups. The class is generated in one or more files using the specified language. The code is specific to the chosen robot.
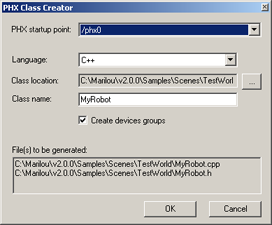 |
PHX startup point: is the robot's first simulation node (see the example). Language: class code language. Class location: class's files destination directory. Class Name: is the class and the class's file name. Create devices groups: allow to create (or not) devices's associated groups (fast read/write). |
In a MODA application, a class that inherits from RobotPHX must be created using the Connection::QueryRobotPHX2<[your classs]>(PHXName) function.
MyRobot.h class code ( the .cpp file is generated too but not shown here) : this class was generated for the robot /phx2 of the world located in samples/scenes/testworld:
///////////////////////////////////////////////////////// //File generated by anyKode-Marilou class Creator v1.0 //MyRobot.h ///////////////////////////////////////////////////////// ///////////////////////////////////////////////////////// //Usage: // //xkode::lib::String RobotWorldPath="/phx2"; //xkode::lib::String ModaServer="127.0.0.1"; //ModaCPP::Connection *pConnection=new ModaCPP::Connection(true); //if(pConnection->Connect(ModaServer)) // { // MyRobot *pRobot=pConnection->QueryRobotPHX2<MyRobot>(RobotWorldPath); // if( (pRobot!=NULL) && pRobot->IsValid()) // { // //The robot is created and all devices are valid // //You can use devices and make your robotics loop here // } // } ///////////////////////////////////////////////////////// #include "ModaCPP.h" using namespace ModaCPP; #ifndef __MYROBOT__H #define __MYROBOT__H //devices names //Type Motor #define MyRobot_MOTOR00_PATH "joint_front_left/axis/motor" #define MyRobot_MOTOR00_INDEX 0 #define MyRobot_MOTOR01_PATH "joint_back_left/axis/motor" #define MyRobot_MOTOR01_INDEX 1 #define MyRobot_MOTOR02_PATH "joint_front_right/axis/motor" #define MyRobot_MOTOR02_INDEX 2 #define MyRobot_MOTOR03_PATH "joint_back_right/axis/motor" #define MyRobot_MOTOR03_INDEX 3 //Type Distance #define MyRobot_DISTANCE00_PATH "irleft/ray/device_ir" #define MyRobot_DISTANCE00_INDEX 0 #define MyRobot_DISTANCE01_PATH "irright/ray/device_ir" #define MyRobot_DISTANCE01_INDEX 1 #define MyRobot_DISTANCE02_PATH "irback/ray/device_ir" #define MyRobot_DISTANCE02_INDEX 2 class MyRobot:public RobotPHX { private: bool _bValid; //devices arrays xkode::lib::Array<DeviceMotor*> _Motors; xkode::lib::Array<DeviceDistance*> _Distances; //Devices groups DevicesGroupMotor *_pMotorsGroup; DevicesGroupDistance *_pDistancesGroup; public: MyRobot(xkode::lib::String PHXName); virtual ~MyRobot(); virtual void OnStartup(void) override; bool IsValid(void) {return(_bValid);} //Getting devices with the same type xkode::lib::Array<DeviceMotor*> *GetMotors(void) {return(&_Motors);} xkode::lib::Array<DeviceDistance*> *GetDistances(void) {return(&_Distances);} //Getting groups DevicesGroupMotor* GetMotorsGroup(void) {return(_pMotorsGroup);} DevicesGroupDistance* GetDistancesGroup(void) {return(_pDistancesGroup);} //getting device from its path or index DeviceMotor* GetMotorByIndex(int Index) { DeviceMotor *pRet=GetDeviceFromArray<DeviceMotor*>(_Motors,Index); return(pRet); } DeviceMotor* GetMotorByPath(xkode::lib::String DeviceRelativePath) { DeviceMotor *pRet=GetDeviceFromArray<DeviceMotor*>(_Motors,DeviceRelativePath); return(pRet); } DeviceDistance* GetDistanceByIndex(int Index) { DeviceDistance *pRet=GetDeviceFromArray<DeviceDistance*>(_Distances,Index); return(pRet); } DeviceDistance* GetDistanceByPath(xkode::lib::String DeviceRelativePath) { DeviceDistance *pRet=GetDeviceFromArray<DeviceDistance*>(_Distances,DeviceRelativePath); return(pRet); } protected: //getting a device from an array template<class T> T GetDeviceFromArray(xkode::lib::Array<T> &_Array,int Index) { if(Index<_Array.Count()) return(_Array[Index]); else return(NULL); } //getting a device from an array template<class T> T GetDeviceFromArray(xkode::lib::Array<T> &_Array,xkode::lib::String RelativeDevicePath) { T pRet=NULL; xkode::lib::String temp=RelativeDevicePath.ToLower(); for(int i=0;i<_Array.Count();i++) { T _device=(T)_Array[i]; if(_device->GetName().ToLower()==temp) { pRet=_device; break; } } return(pRet); } }; #endif
|
Documentation v4.7 (18/01/2015), Copyright (c) 2015 anyKode. All rights reserved.
|
|
What do you think about this topic? Send feedback!
|







 Description
Description