Prepare the simulation project.
We will prepare a project that contains a world. Also, we will add a PHX (physics file) that defines the robot. In future chapters we will duplicate this robot two times in the world.
|
Step |
Description |
|
Create the project: (you can learn more about creating a project from previous chapter: Creating a project). Create a project named myproject that contains a world named world (use the automatic minimum project). |
 |
|
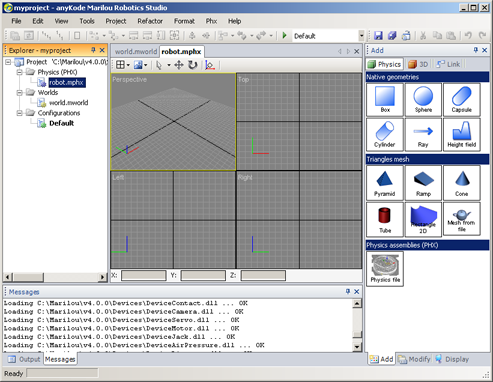
Add a new PHX (the robot): Right click on Physics (PHX) folder and choose Add new PHX from contextual menu. Save the PHX as robot.mphx. |
 |
|
Result: Now, project and files are created. You can Save All for saving all changes. Note: it is possible to create the robot directly inside the world. Using PHX is the best way for creating autonomous robots or complex assemblies. |
 |
|
Documentation v4.7 (18/01/2015), Copyright (c) 2015 anyKode. All rights reserved.
|
|
What do you think about this topic? Send feedback!
|







 Description
Description