A PHX is an autonomous physical entity that may either be imported into a higher-level PHX or into a world directly.
A PHX is a file that you can edit in Marilou. It contains the definition of a robot or autonomous physical entity. A PHX may later be imported into other PHXs or into worlds. This concept makes it possible to reuse a robot built for a previous simulation project in a new project.
PHXs can also be used to isolate the various components in a robot. This makes it possible to import them into higher-level entities according to the following "ascending" concept:
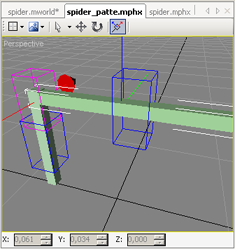 |
"Spider" example: A PHX contains the definition for a "leg," including the collision modem, assembly in a rigid body, and the type of connection between the rigid bodies. This autonomous PHX entity can be reused in other models where a "leg" is required. |
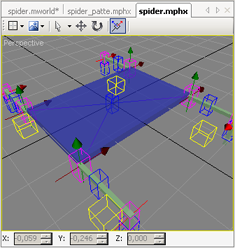 |
The Spider PHX is an assembly of 4 references to pattes.phx with a "box". The legs are connected to the box using "universal" connectors. |
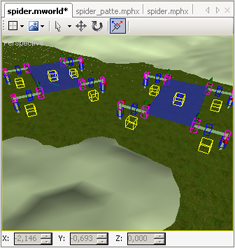 |
The world (which is actually composed of higher-level PHX's, may contain multiple references to the spider robot. Creating the world consists of importing references to already-assembled PHX's. The spider.mworld world contains:
|
|
Documentation v4.7 (18/01/2015), Copyright (c) 2015 anyKode. All rights reserved.
|
|
What do you think about this topic? Send feedback!
|







 Description
Description