Configuration is the starting point for simulation.
Running a simulation always requires an associated configuration. The configuration contains various simulation parameters, including the world to be used. Your project may contain several configurations (or scenarios). You may switch from one configuration to another easily in order to test, for example, a particular algorithm in specific problematic cases or difficult situations.
This concept can be compared this to the "Release" and "Debug" concept in C++ projects.
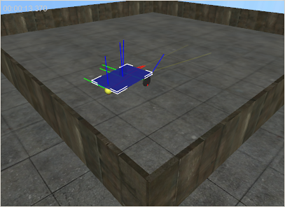 |
Configuration1: run world 1 (containing a wooden enclosure, a floor, and robot 1), with specific physics parameters. This configuration tests robot 1's wall-following features. |
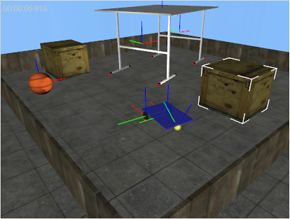 |
Configuration2: run world 2 (containing a wooden enclosure, a floor, a table, 2 wooden boxes, a basketball, and robot 1), with another specific physics parameters. This configuration tests the overall algorithm embedded in robot 1. |
You may switch from one configuration to the other in order to test particular features of the overall algorithm. The project itself may contain several configurations.
|
Documentation v4.7 (18/01/2015), Copyright (c) 2015 anyKode. All rights reserved.
|
|
What do you think about this topic? Send feedback!
|







 Description
Description