Compatibility with Gostai URBI.
URBI may be accessed via one or more TCP ports. Servers are noted as "Urbi for xxxxx", where xxxxx implements the robot's specific UObjects. A single robot may contain several servers.
|
PHX configuration |
Description |
|
Attach the "Gostai Urbi for xxxxx" to the PHX | |
|
Edit plugin properties (default folders, device mapping, etc.) |
|
|
Save the PHX, which is now comptible with the URBI language. All the selected robot's UObjects are accessible. |
|
|
Use |
|
|
Place the PHX in a world. |
|
|
Select the Data Servers tab in the current configuration (that which is executing the world that contains the robot). Change the TCP port values so that each server has a unique number. Check/uncheck "Gostai Urbi servers enabled" to allow/block server startup. |
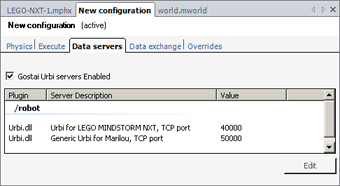 |
Execute simulation: your robot is accessible via the selected TCP port and is ready to receive URBI commands..
URBI Programming
|
Documentation v4.7 (18/01/2015), Copyright (c) 2015 anyKode. All rights reserved.
|
|
What do you think about this topic? Send feedback!
|







 Description
Description