Dynamics parts.
In this chapter, we will create physics geometries required for robot. We will talk about joints, distance sensors and motors in the next chapters.
|
Step |
Description |
|
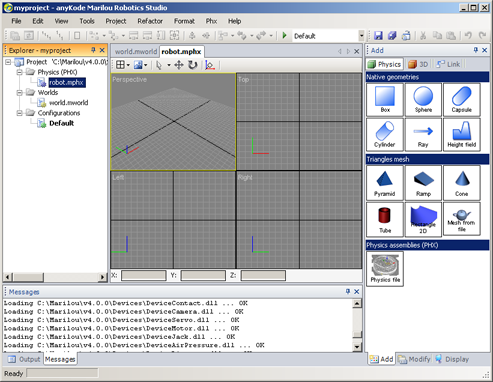
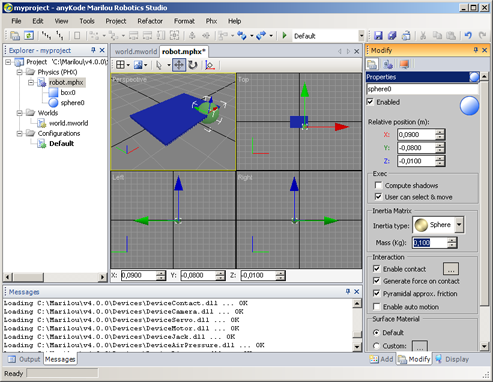
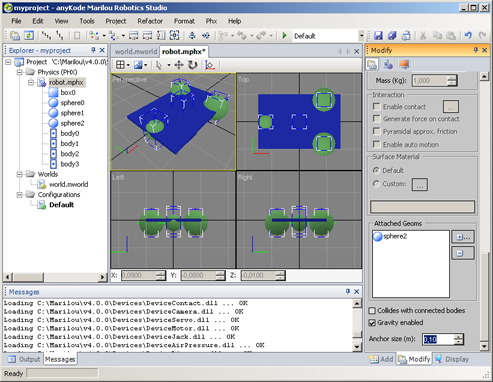
Activate the robot.mphx document: If robot.mphx is not open, double click on corresponding tree-node from Explorer in order to open the document. From right panels, choose the Add panel -> physics geometries are shown, we will use it for the robot. |
 |
|
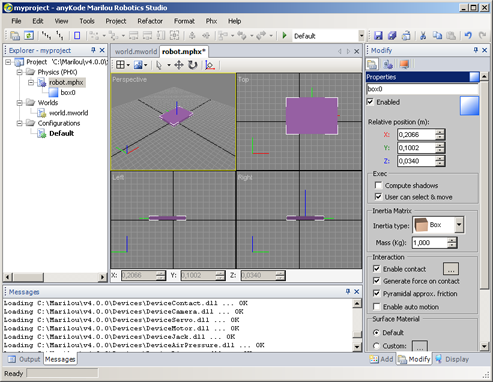
Create de mobile base:
|
 |
|
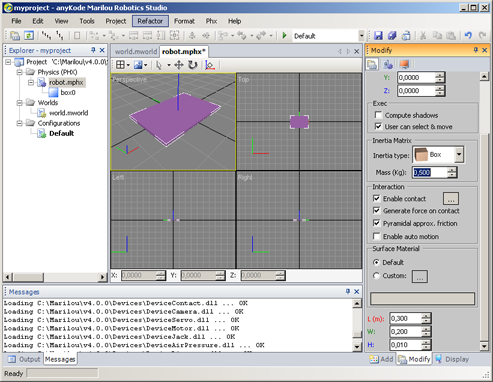
Box physics properties:
|
 |
|
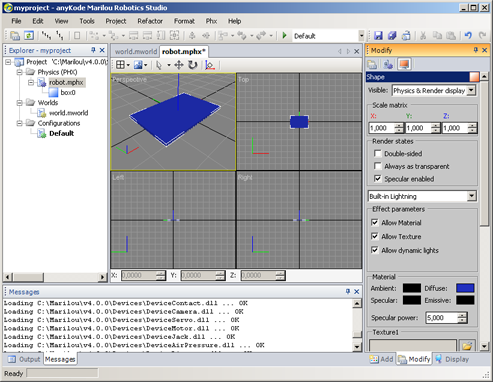
Box display properties: Click on Shape icon (red screen) for showing box's display properties. From Material group, click on the Diffuse button and choose for exemple the blue color. Note that transparency is performed by changing the diffuse color's alpha property. |
 |
|
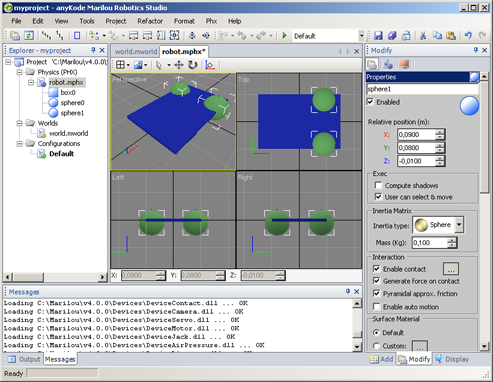
Creating the first wheel: We will use Sphere for creating wheels because collision detection is faster with this kind of geometries than Cylinders or Capsules (CPU).
|
 |
|
Creating the second wheel:
|
 |
|
Rear wheel:
|
 |
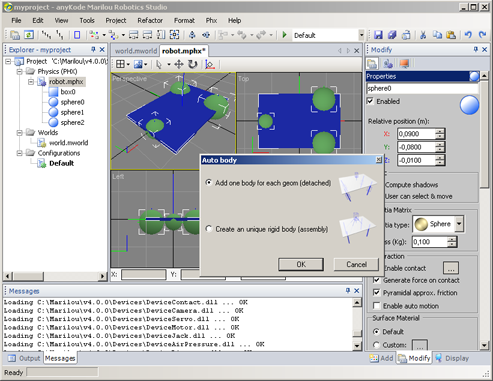
Now, geometries are static. We will create dynamics property using Rigid Bodies (Rigid Body geometries).
In the world, we use the static geometries for creating entities with an infinite mass that is very fast to simulate. For exemple a building, a bridge or a test area. These entities do not need to be dynamic, it is therefore unnecessary for the solver to lose time making a balance of forces on these objects. Note that the static entities are involved in shock with the dynamic entities!
|
Step |
Description |
|
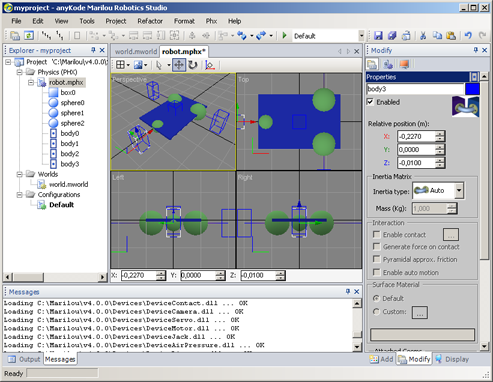
Creating Rigid Bodies: We will use the automatic method for creating rigid bodies.
|
 |
|
Adjusting sizes: You can see that rigid bodies size (which is purely visual and has no effect in the simulation) is not uniform.
|
 |
|
For more comfort for the future, move the rigid bodies in order make them away from the robot. This manipulation does not affect the simulation because rigid bodies are in automatic mode (Inertia type 'Auto'). (See Rigid Bodies properties) |
 |
|
Rename entities:
|
 |
If you try to run the simulation with this model, you will see that geometries are ejected ! Indeed, the dynamic entities are in a situation that is not normal because they are in a state of interpenetration. The simulator will have no other choice that to apply massive force to try to separate out from each other.
|
Documentation v4.7 (18/01/2015), Copyright (c) 2015 anyKode. All rights reserved.
|
|
What do you think about this topic? Send feedback!
|







 Description
Description for reset the box's position and rotation,
for reset the box's position and rotation, ) for starting automatic creating,
) for starting automatic creating,