Create a joint between two rigid bodies.
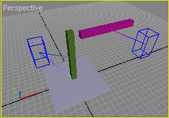
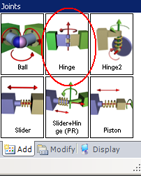
Joints are used to bring to rigid bodies together with varying degrees of movement. In this example, we use the joint called Hinge (1 axis), which will connect an "arm" to a "base".
|
Actions |
Description |
|
Here we use work carried out in Marilou tutorials 1 & 2. The base is composed of two boxes assembled as a solid body. The arm is a simple box, as well as a solid body. If we run the simulator at this point, the arm would fall to the ground, as it is not yet connected to anything. Let's start be creating the joint between these two solid bodies. |
 |
|
Creating a jointed entity
|
 |
|
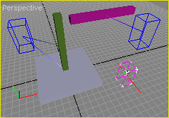
At this point the joint is laying on the ground and is not connected. Switch to selection mode to continue. |
 |
|
 |
|
 |
|
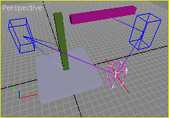
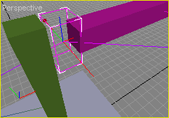
Rotation of the body /body_arm with respect to the base (/body_socle) takes place around the joints axis. Now we need to move the joint so that it is closer to the green box's axis. |
 |
|
You may now run the simulator, and the arm will pivot around the joint's axis. Please notice that the arm "goes through" the green box. In order to allow collision detection between two dynamic objects connected by a joint, activate the Collides with connected body(s) options for the two rigid bodies used in the example. |
|
|
Documentation v4.7 (18/01/2015), Copyright (c) 2015 anyKode. All rights reserved.
|
|
What do you think about this topic? Send feedback!
|







 Description
Description