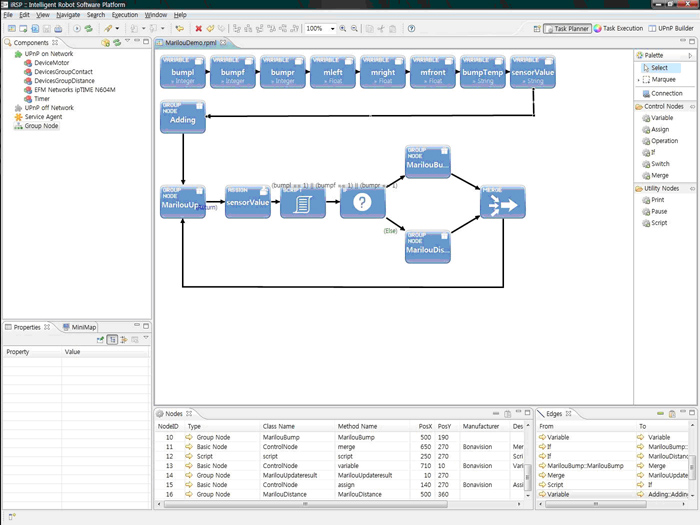
Build a plan in the iRSP environment
- You can build a plan using components and extra nodes (Control Nodes, Utility Node) that iRSP provides such as If, Variable, and Script. These extra nodes enable you to make a plan by using the programming logic for example, conditional expressions.
- The components that you can use are listed in iRSP as you can see in the red box of the below figure, and you can use the extra nodes shown in the blue box of the below figure.
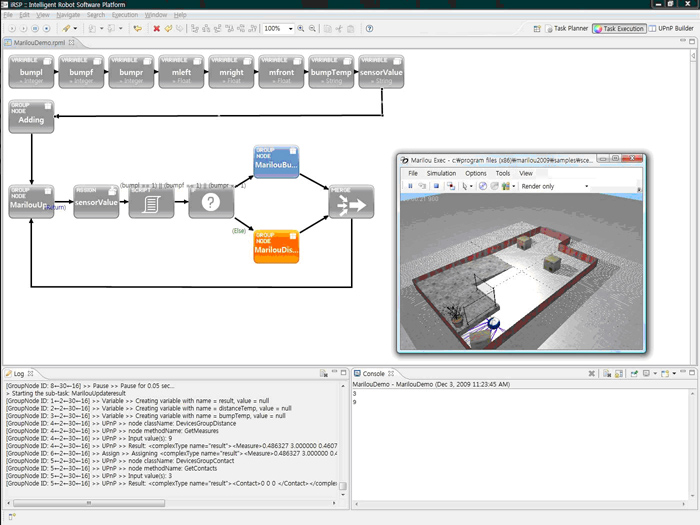
- In this example, the plan is based on the sample code (Samples\Scenes\Vaccum\Navigate\Source\Robot.cpp) that Marilou 2009 provides.
Run the plan built in the previous step







 Description
Description