The robot in sample Samples/Scenes/Vacuum is assembled with native geometries then dressed with a 3D model that does not act in physical simulation.
|
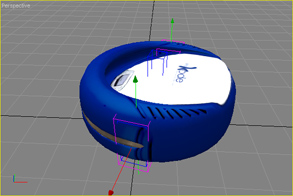
Complete robot: |
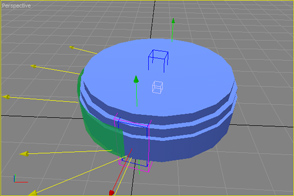
Simulated geometries (physics): |
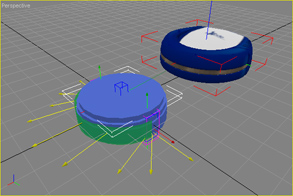
3D model is attached to one physics geometry: |
 |
 |
 |


