Rigid bodies properties.
|
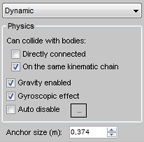
Attached Geoms: indicates the entities that are assembled into a rigid body. Click on  or or  to add or remove geometries. to add or remove geometries.Dynamic/Kinematic: indicates if the body is dynamic or kinematic. Can collide with bodies: indicates if the body is allowed to collide with another near body: Directly connected: applies on 2 rigid bodies directly connected by a joint and about to collide: if the property is checked, the 2 bodies are allowed to collide and generate forces. Otherwise, there is an interpenetration without any force. On the same kinematic chain: applies on 2 rigid bodies on the same kinematic chain (but directly connected) and about to collide: if the property is checked, the 2 bodies are allowed to collide and generate forces. Otherwise, there is an interpenetration without any force. Collides with connected body(ies): indicates whether or not the physics engine needs to test for collisions between this rigid body and its "neighbor" when they are connected. Gravity enabled: indicates if gravity force vector is applied on the rigid body. Gyroscopic effect: enable/disable the gyroscopic effect. Auto Disable: enable/disable the Auto Disable flag. If enabled, the checkbox's right side button let user to configure this working mode. Anchor size: indicates the size of the blue square in the model. This property is purely visual and has no effect in the simulation. |
 |
|
Documentation v4.7 (18/01/2015), Copyright (c) 2015 anyKode. All rights reserved.
|
|
What do you think about this topic? Send feedback!
|







 Description
Description