Using Lidar.
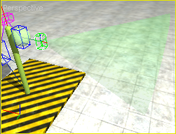
Lidar are attached to Zone entities (choose 'arc' zone style).
|
Step |
Description |
|
 |
|
 |
|
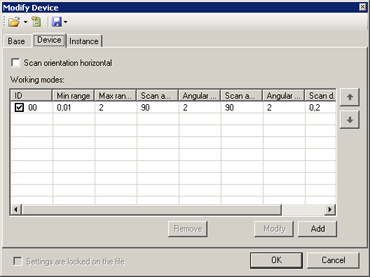
Double-click on the device for open the settings dialog box: You can configure several working modes and set the default working mode by checking the corresponding line. If needed, you can choose in the Instance panel, what is your preferred default working mode for this instance. Scan orientation vertical: if the property is checked, the scan is done from top to bottom (Vertical). Otherwise, the scan is done from left to right (Vertical). Min range: minimum distance (m): above this distance, the sensor cannot see obstacles. Max range: Maximum detectable distance (m). Scan duration: time required for the system to complete scan (s). Scanning angle: horizontal scanning angle (°) Scanning angleV: vertical scanning angle (°) Angular resolution: angle between 2 horizontal measures (°) Angular resolution V: angle between 2 vertical measures (°) Noise: additional measure noise (+- %) |
 |
|
In MODA programming, Lidar is accessible via the DeviceLidar class. The device's full path in this example, starting at PHX "/" is "zone0/device0". |
|
|
Documentation v4.7 (18/01/2015), Copyright (c) 2015 anyKode. All rights reserved.
|
|
What do you think about this topic? Send feedback!
|







 Description
Description